If points are collected using Carlson Surv CE with an RTK solution STAR*NET can import the vector information from the rw5 file that the program stores.
In STAR*NET:
Set your project options so the correct Coordinate System is applied
Select Input | Import GPS Data
Configure as below and select Import!
Notes on including Vectors in Carlson SURV CE raw file:
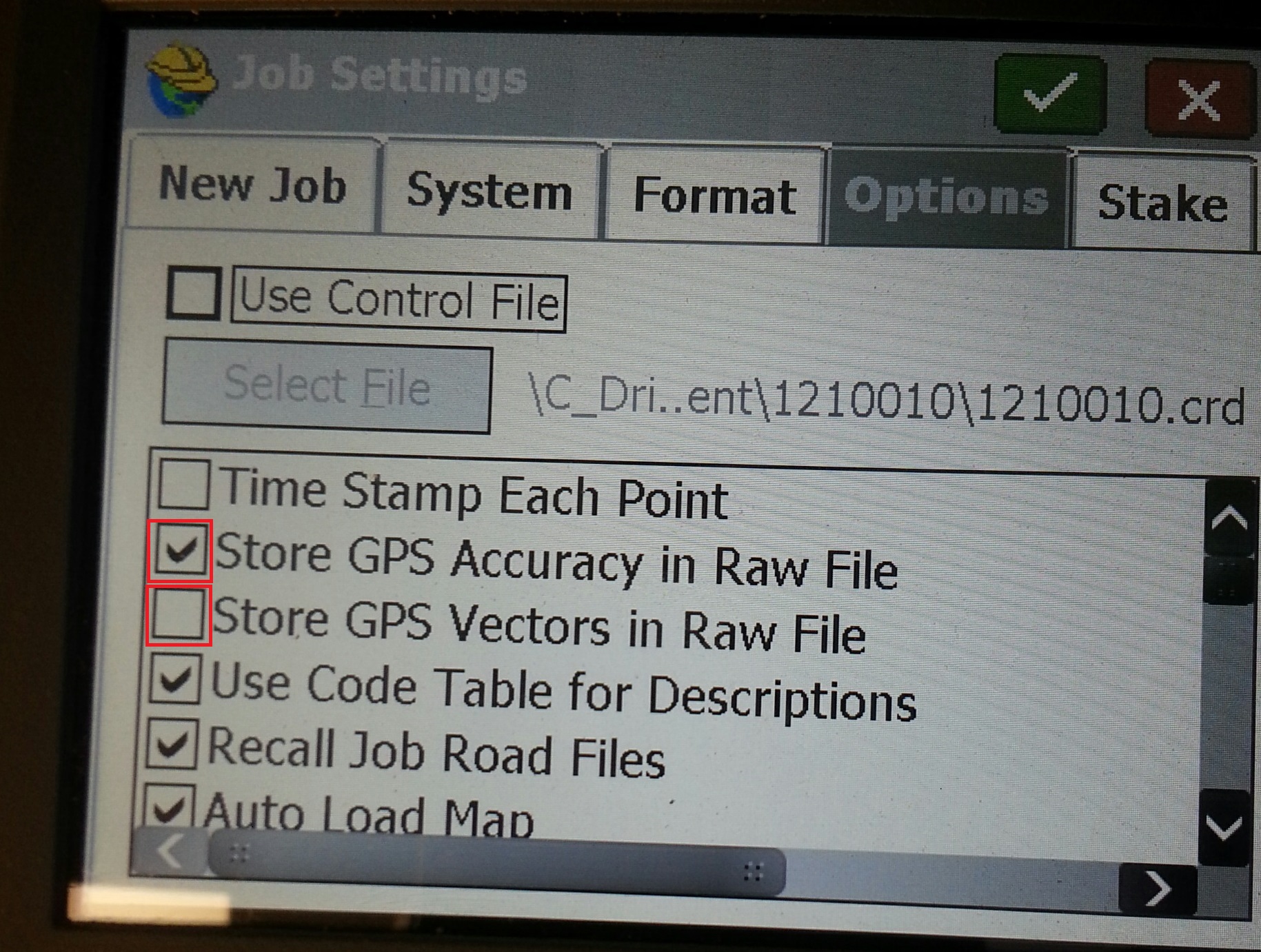
- In SURV CE 4.0, there is an option you must select to tell the software to store vectors:
- In some cases Carlson Vectors are commented out, the article below explains how you can "uncomment" them in the raw file:
Examining the rw5 in Notepad:
It is useful to open rw5 files using Windows notepad or a text editor. In the rw5 file quoted below the base receiver was allowed to average for a number of epochs and then the position was set so that all positions (and vectors) will be calculated relative to that point:
JB,NM1777,DT09-30-2011,TM07:34:06
MO,AD0,UN2,SF0.99985948,EC0,EO0.0,AU0
--Scale Point N:5000.00000000 E:5000.00000000
--SurvCE Version 2.56
--CRD: Numeric
--NJ NAD83
--Equipment: HiPer Pro SN:309-0535
--Localization File: None
--Geoid Separation File: \C_Drive\Data\geoid.gsf
--GPS Scale: 0.99985948
--GPS Scale Point N:5000.00000000 E:5000.00000000
--Base Configuration by Reading GPS Position
--DT09-30-2011
--TM07:34:06
--Base Rod Hgt: 5.348
--Antenna Type: [HIPER_PRO],RA0.0763m,SHMP0.0285m,L10.1060m,L20.0971m,--Topcon Internal
BP,PNBP0000001,LA40.553074293012,LN-73.555331548307,EL98.2618,AG1.524,PA0.106,--
--Antenna Type: [HIPER_PRO],RA0.0763m,SHMP0.0285m,L10.1060m,L20.0971m,--Topcon Internal
--RTK Method: CMR+, Device: Cable or Generic Device
--Entered HR: 5.0000, Vertical
LS,HR5.3478
GPS,PN2,LA40.553032851037,LN-73.555263905917,EL97.080963,--TR-MAG
--GS,PN2,N 762523.7717,E 649361.1995,EL416.1696,--TR-MAG
G0,09/30/2011 11:39:19,Base ID read at rover: 0000
G1,BPBP0000001,PN2,DX17.279,DY-2.809,DZ-10.433
G2,VX0.01823843,VY0.03938653,VZ0.01501757
G3,XY-0.00014323,XZ0.00010414,YZ-0.00022652
--GT,PN2,SW1655,ST473959000,EW1655,ET473959000
--HRMS:0.098, VRMS:0.114, STATUS:FIXED, SATS:9, PDOP:2.979, HDOP:1.244, VDOP:2.707
--Localization File: \C_Drive\Data\1777.loc
--Number of Localization Points Used: 1
--Localization Scale: 1.00000000
--Localization Azimuth: State Plane Grid
--GPS Scale: 0.99990832
--GPS Scale Point N:762523.78797855 E:649361.20870456
The items outlined in red are all that Star*Net will need to calculate the vector from the base receiver to each of the points (the record for Point number 2 is shown in this example, the BP record shows the averaged lat/long value of the base receiver)
After importing the example above you can look in the Output File tab and see:
.GPS WEIGHT COVARIANCE
G0 'V1 09/30/2011 11:39:19,Base ID read at rover: 0000
G1 BP0000001-2 17.279000 -2.809000 -10.433000 1.630/1.630
G2 1.823843000000E-002 3.938653000000E-002 1.501757000000E-002
G3 -1.432300000000E-004 1.041400000000E-004 -2.265200000000E-004
The user will need to set the location of position BP0000001 using a P record to enter the Latitude/Longitude value of the base receiver or a C record to set the Northing, Easting and Elevation. After that you can process your vectors.
What if no Vectors are found?
But in some cases the vector importer will show no vectors. The user will only see ".GPS WEIGHT COVARIANCE" in the Output tab.
This happens in cases where the base was programmed by localizing it to a known point so that all coordinates are calculated relative to that point when in an RTK solution. An rw5 file is quoted below in which the user selected point 1 at coordinates 5000, 5000, 100 as the designated location for the base receiver (see section in blue):
JB,NM1788,DT11-09-2011,TM09:10:23
MO,AD0,UN2,SF0.99987755,EC0,EO0.0,AU0
--SurvCE Version 2.56
--CRD: Numeric
--NJ NAD83
--Equipment: HiPer Pro SN:309-0535
--Localization File: None
--Geoid Separation File: \C_Drive\Data\geoid.gsf
--GPS Scale: 0.99987755
--Scale Point not used
--Base Configuration by Reading GPS Position
--DT11-09-2011
--TM09:10:23
--Base Rod Hgt: 4.928
--Antenna Type: [HIPER_PRO],RA0.0763m,SHMP0.0285m,L10.1060m,L20.0971m,--Topcon Internal
--BP,PNBP0000001,LA40.420133953972,LN-74.033889051908,EL-30.3957,AG1.396,PA0.106,--
--Antenna Type: [HIPER_PRO],RA0.0763m,SHMP0.0285m,L10.1060m,L20.0971m,--Topcon Internal
SP,PN1,N 5000.0000,E 5000.0000,EL100.0000,--TR-MAG
--Localization File: \C_Drive\Data\1788.loc
--Number of Localization Points Used: 1
--Localization Scale: 1.00000000
--Localization Azimuth: State Plane Grid
--GPS Scale: 0.99991690
--GPS Scale Point N:5000.00000000 E:5000.00000000
--DT11-09-2011
--TM09:22:06
--RTK Method: CMR+, Device: Cable or Generic Device
--Entered HR: 5.0000, Vertical
LS,HR4.9278
GPS,PN10,LA40.420133954300,LN-74.033889049600,EL-30.395900,--TR-SPK
--GS,PN10,N 4976.4903,E 5036.3161,EL99.5743,--TR-SPK
--GPS Scale: 0.99991690
--Entered HR: 5.0000, Vertical
LS,HR5.3478
--GPS,PN2000,LA40.420157366263,LN-74.033936031832,EL-30.122679,--TR-MAG
--GS,PN2000,N 5000.0027,E 5000.0114,EL100.0515,--TR-MAG
--G0,11/09/2011 13:27:22,(Average) - Base ID read at rover: 0000
--G1,BPBP0000001,PN2000,DX-11.842,DY1.300,DZ5.653
--G2,VX0.00624672,VY0.02237377,VZ0.03326089
--G3,XY-0.00000192,XZ0.00000231,YZ-0.00007193
--GT,PN11,SW1661,ST307460000,EW1661,ET307642000
--Valid Readings: 180 of 180
--Fixed Readings: 180 of 180
--Nor Min: 4999.9769 Max: 5000.0312
--Eas Min: 4999.9981 Max: 5000.0301
--Elv Min: 99.9896 Max: 100.1042
--Nor Avg: 5000.0027 SD: 0.0090
--Eas Avg: 5000.0114 SD: 0.0062
--Elv Avg: 100.0515 SD: 0.0218
--HRMS Avg: 0.0951 SD: 0.0082 Min: 0.0757 Max: 0.1162
--VRMS Avg: 0.0934 SD: 0.0073 Min: 0.0764 Max: 0.1122
--HDOP Avg: 0.9160 Min: 0.8942 Max: 0.9669
--VDOP Avg: 1.4374 Min: 1.3449 Max: 1.5438
--PDOP Avg: 1.7046 Min: 1.6213 Max: 1.8216
--Number of Satellites Avg: 12 Min: 12 Max: 14
--HRMS:0.100, VRMS:0.098, STATUS:FIXED, SATS:13, PDOP:1.758, HDOP:0.952, VDOP:1.478
The items marked in red are now shown as "commented out" by the "--" prefixes. STAR*NET will ignore these entries and no vectors will be imported.
The solution is to save a second copy of the rw5 file and then edit it so that the GPS, BP, G0, G1, G2 and G3 records are no longer commented out by removing the "--"
In notepad an easy strategy is to open Edit | Replace... four times:
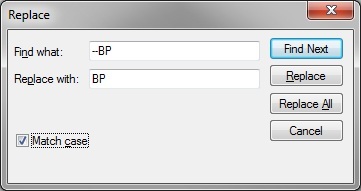
replace --BP with BP
replace --G0 with G0
replace --G1 with G1
replace --G2 with G2
replace --G3 with G3
Once the rw5 has been modified you can import the vectors. After importing you can look at the .GPS file or at the Output File tab where you will see:
.GPS WEIGHT COVARIANCE
G0 'V1 11/09/2011 13:27:22,(Average) - Base ID read at rover: 0000
G1 BP0000001-2000 -11.842000 1.300000 5.653000 1.502/1.630
G2 6.246720000000E-003 2.237377000000E-002 3.326089000000E-002
G3 -1.920000000000E-006 2.310000000000E-006 -7.193000000000E-005
James Johnston
Comments